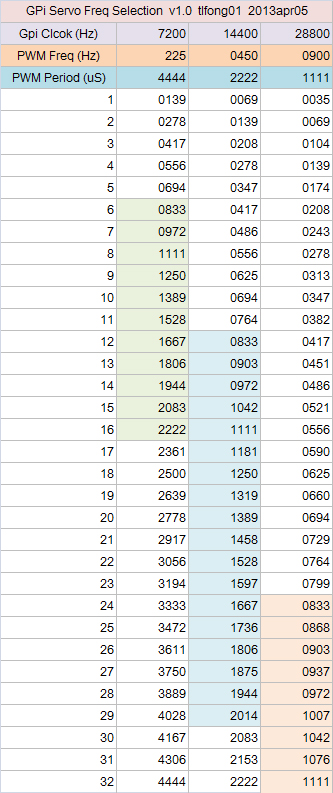
Now I am using Excel to check that 14.4KHz is the optimum for GPi servo control.
1. GPi binary counts down input clock 5 stages. So 7.2 KHz counts down to 225 Hz.
2. 1/32 duty cycle pulse width = (1 / 225) * 1 000 000 uS = 4444 uS (4.44 mS)
3. 12/32 duty cycle gives a pulse width of 833 uS
4. 31/32 duty cycle gives a pulse with of 2150 uS.
5. So the resolution is 31 - 12 = 19.
6. 7.2KHz has a resolution of 16 - 6 = 10. worse.
8. 28.8KHz has a resolution of 32 - 24 = 8, even worse.
So 14.4K seems the best.
.END
No comments:
Post a Comment